
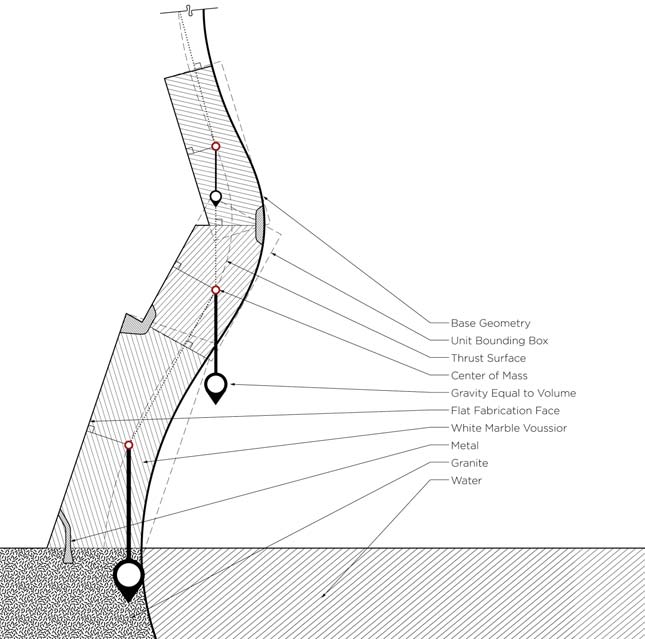
Section of assembly strategy
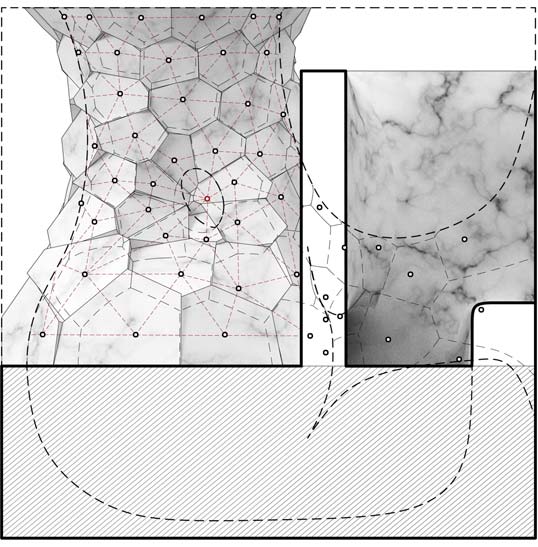
3d diagram showing particles, springs and final voussoirs

Geometric variations of joints and tension testing of specimen

6-piece mock-up, interior

6-piece mock-up, exterior
Massachusetts Institute of Technology
University of Michigan
Quarra Stone
Matter Design